Case Study: Motion Capture System for Hand Tracking Using Polhemus System
In this study, we developed the high accuracy Hand MoCap system by using the electromagnetic tracker LIBERTY™ 16 tracking system by Polhemus. The system uses small and light receivers. The cables of the receivers were replaced with special thin cables so as not to block the movement of the fingers.
Kazutaka Mitobe, Takaaki Kaiga, Takashi Yukawa,
Takeshi Miura, Hideo Tamamoto, Al Rodgers and Noboru Yoshimura
Akita University, Warabi-za Co., Akita Keizaihoka University, Polhemus
1. Introduction
Motor area that controls the movements of the human body is divided functionally into each control region. In the motor area, the area of the hand is almost the same as the total area of arm, torso and lower body. This physiological fact indicates that human hand movements require very complicated control.
 As a result, our hand can perform high precision movements as an actuator. Motion capture (MoCap) technique that can digitize a position and a posture as a time-series data is widely used in order to create animation and CG. It is very difficult to measure all hand movements because each hand has twenty-seven bones and nineteen joints. The most widely used tool for a hand MoCap has been CyberGlove (Immersion Co.) that can digitize only 80 percent of all hand movements. Therefore, it has been impossible to record the finger movements of a pianist that are high in speed and in accuracy.
As a result, our hand can perform high precision movements as an actuator. Motion capture (MoCap) technique that can digitize a position and a posture as a time-series data is widely used in order to create animation and CG. It is very difficult to measure all hand movements because each hand has twenty-seven bones and nineteen joints. The most widely used tool for a hand MoCap has been CyberGlove (Immersion Co.) that can digitize only 80 percent of all hand movements. Therefore, it has been impossible to record the finger movements of a pianist that are high in speed and in accuracy.
In this study, we developed the high accuracy Hand MoCap system by using the electromagnetic tracker (LIBERTY™ 16 system, Polhemus) that used small and light receivers. The cables of the receivers were replaced with special thin cables so as not to block the movement of the fingers.
 2. System Design
2. System Design
Figure 1 shows the composition of the MoCap system for a hand. The magnetic tracker that is composed from one transmitter (23*28*16 mm) and sixteen receivers (9.6*9.6*9.6 mm) can digitize the distance (x, y, z) from a transmitter to a receiver. The magnetic tracker can digitize the relative angle (Azimuth, Elevation, Roll) of receiver against a transmitter.
Each receiver was processed in order to fit to the finger. We used three receivers in order to measure one finger, and one receiver was used for the back of each hand. Sixteen receivers were used for each hand. Additionally, the adapter unit was modified with a stretch fabric band in order to fit any hand size. Each receiver was attached on the finger using Kinesiotex tape and liquid type plastic in order to prevent the receiver from sliding. Two LIBERTY systems were connected to a computer (ThinkPad, IBM) through a USB interface.
The hand MoCap can measure the data (six degree of freedom) of 32 receivers at the rate of 240Hz simultaneously. The spatial resolution of the hand MoCap was 0.0038 mm. The angle resolution of the hand MoCap was 0.0012deg.
3. Evaluations
The receivers were evaluated to test if the accuracy was affected by the proximity to one another. Our evaluation indicated that the accuracy was not affected even if each receiver was adjacent. The dispersion of position data was under 0.1mm, and the dispersion of angle was under 0.1 deg. This range of dispersion is sufficient to measure human finger movements.
In order to evaluate the user-friendliness of this system, we measured the movements of pianist's finger by the hand MoCap system. Musical composition was "Sonata KV 331, Turkish March" (Mozart, Wolfgang Amadeus). The hand MoCap data was converted into BVA format, and the data was read in MoCap software FiLMBOX. A skeleton and the model of a hand that had been made separately were read in FiLMBOX, and attached to the hand MoCap data that was read earlier.
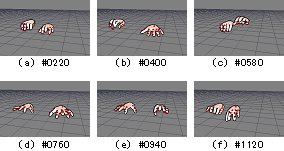 Fig. 2 shows the CG animation of the pianist's musical performance scene (click the photo to watch Micro Sensor 1.8 in action!). We confirmed that the CG animation closely resembled the video image filmed by a video camera. This shows that the hand MoCap system can digitize the finger movements accurately. The automation of making the CG animation from the Hand MoCap data, which currently is done manually, would make a significant improvement. In the future study, we will develop the automatic algorithm in order to calibrate the hand MoCap data.
Fig. 2 shows the CG animation of the pianist's musical performance scene (click the photo to watch Micro Sensor 1.8 in action!). We confirmed that the CG animation closely resembled the video image filmed by a video camera. This shows that the hand MoCap system can digitize the finger movements accurately. The automation of making the CG animation from the Hand MoCap data, which currently is done manually, would make a significant improvement. In the future study, we will develop the automatic algorithm in order to calibrate the hand MoCap data.
This study was supported by the 'strategic information and communications R&D promotion programme (SCOPE) of the Ministry of internal affairs and communications of Japan.
Learn More:
- LIBERTY
- Download PDF
- Contact sales@polhemus.com